-
 Call Now ! 7905582725
Call Now ! 7905582725 -
 Email Now Help@makerspacekanpur.com
Email Now Help@makerspacekanpur.com
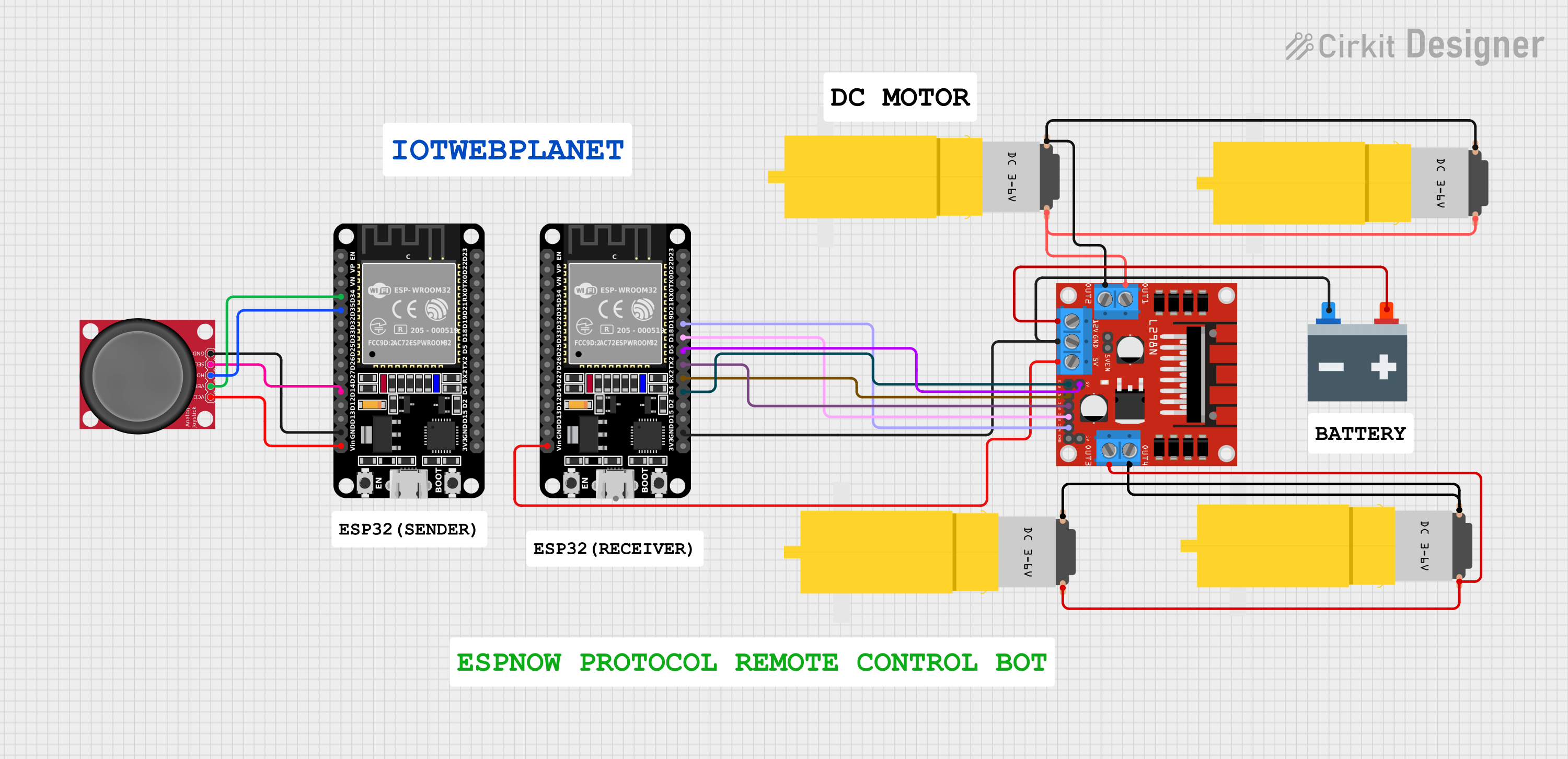
Wireless bot control with speed adjustment via joystick tilt
In this project, we built a wireless robot controlled via a joystick and two ESP32 boards using the ESP-NOW communication protocol. Unlike Wi-Fi or Bluetooth, ESP-NOW enables fast, peer-to-peer data transfer between ESP32 devices using MAC addresses, making it ideal for real-time robot control.
The robot’s movement and speed are controlled through analog joystick input, and an L298N motor driver handles motor driving on the receiving end.
| Component | Description |
|---|---|
| 2x ESP32 | One for sending joystick data, one for receiving and controlling motors |
| Joystick Module | Outputs analog X/Y values |
| L298N Motor Driver | Dual H-Bridge to drive DC motors |
| Robot Chassis | With 2x DC motors |
| Jumper Wires + Power | Batteries or USB |
The sender ESP32 reads the X and Y analog values from a joystick.
These values are sent via ESP-NOW protocol to the receiver ESP32.
The receiver ESP32 processes the data and controls the L298N motor driver using the L298NX2 library.
Speed is adjusted based on how far the joystick is pushed.
Y-axis forward → robot forward
Y-axis backward → robot reverse
X-axis left/right → turn accordingly
Small movements result in low speed; full push gives max speed.
To communicate using ESP-NOW, both ESP32 boards need to:
Be in WiFi Station mode
Share the receiver’s MAC address
Be added as peers in the ESP-NOW network
Use this code on the receiver ESP32 to get its MAC ad
| Joystick Pin | ESP32 Pin |
|---|---|
| VRx | GPIO 34 |
| VRy | GPIO 35 |
| GND | GND |
| VCC | 3.3V |
| L298N Pin | ESP32 Pin |
|---|---|
| IN1 | 18 |
| IN2 | 19 |
| IN3 | 16 |
| IN4 | 17 |
| ENA | 4 (PWM) |
| ENB | 5 (PWM) |
Forward push: robot moves ahead
Full tilt → max speed
Side push: turns left or right
Release joystick → bot stops
Tested delay: ~50ms for excellent real-time response
Use this code on the receiver ESP32 to get its MAC ad

As per official documentation Step by step process for pico program run after power on:Save your pyt...

ESP32 Board are so popular? Mainly because of the following featuresLow-costBluetoothWiFiLow PowerDu...

Node MCU ESP8266 Board are so popular? Mainly because of the following features.Its true Arduino Kil...

🔧 Basic IntroductionL298N is a dual H-Bridge motor driver IC that allows controlling the direction...

🔧 Components Needed:ComponentQuantityESP32 Dev Board1L298N Motor Driver Module1DC Gear Motors (TT o...

The ADXL335 is a small, thin, low-power 3-axis analog accelerometer manufactured by Analog Devices....

🧠 What is an Ultrasonic Sensor?An ultrasonic sensor is a device that uses sound waves to detect how...

📌 What is the DHT11 Sensor?The DHT11 is a basic, low-cost digital temperature and humidity sensor....

🔥 FIRE BOT – Bluetooth Controlled Fire Extinguisher RobotWelcome to the FIRE BOT project! This robo...

BMP180 Sensor: Digital Barometric Pressure SensorThe BMP180 is a digital barometric pressure sensor...
🔧 1. Hardware Overview: 1.8" TFT DisplayMost 1.8" TFT modules are based on the ST7735 driver and co...

The SSD1306 is a popular controller used in OLED (Organic Light Emitting Diode) displays, most commo...

A servo motor is a type of motor designed for precise control of angular position, making it ideal f...
.png)
The Gravity Voice Recognition Module is a user-friendly module developed by DFRobot that allows micr...
.png)
The APDS-9960 is an advanced, compact sensor from Broadcom (formerly Avago Technologies) that offers...

🔍 What is the 28BYJ-48 Stepper Motor?The 28BYJ-48 is a 5V unipolar stepper motor with a built-in re...

How Soil Moisture Sensor Works and Interface it with Esp32 When you hear the term “smart garden,” on...

🔧 What is an Analog Joystick?An analog joystick typically has:2 potentiometers (one for X-axis, one...

📡 What is the NEO-8M GPS Module?The NEO-8M is a high-precision GNSS GPS receiver by u-blox, capable...
🔧 What is a NeoPixel?NeoPixel is Adafruit’s name for individually addressable RGB LEDs using the WS...

🧠 What is a PIR Sensor?PIR = Passive Infrared SensorA PIR sensor detects motion by measuring change...

✅ What is AI Thinker GP-02?The AI Thinker GP-02 is a GNSS (GPS) module, designed to work with satel...

📡 What is SIM900?The SIM900 is a GSM/GPRS module from SIMCom. It allows microcontrollers like ESP32...

🧠 What is a Push Button?A push button is a simple mechanical switch that connects two points in a c...

🤔 What is a Tilt Sensor?A tilt sensor (also called a ball switch or mercury switch) is a digital sw...

🎨 What is the TCS34725?The TCS34725 is a color sensor made by AMS (now part of Renesas).It detects...

📘 What is an I2C LCD?An I2C LCD is a Liquid Crystal Display that uses the I2C communication protoco...

🧠 What is MPU6050?The MPU6050 is a 6-axis motion tracking device made by InvenSense. It combines:✅...

🌡️ What is DS18B20?The DS18B20 is a digital temperature sensor from Maxim Integrated (now Analog Dev...

⏰ What is DS1307 RTC?The DS1307 is a real-time clock IC by Maxim Integrated that keeps track of:Sec...

🎵 What is DFPlayer Mini?The DFPlayer Mini is a tiny, standalone MP3 audio player module. It can pla...

📡 What is an IR Receiver?An IR (Infrared) Receiver module receives signals from an IR remote contro...

📌 What is a Rotary Encoder?A rotary encoder is an electro-mechanical sensor that converts the angul...

📌 What is the Dot Matrix Display with MAX7219?A Dot Matrix Display is an arrangement of LEDs in a g...
.png)
📌 What is ESP-NOW?ESP-NOW is a wireless communication protocol developed by Espressif, allowing ESP...
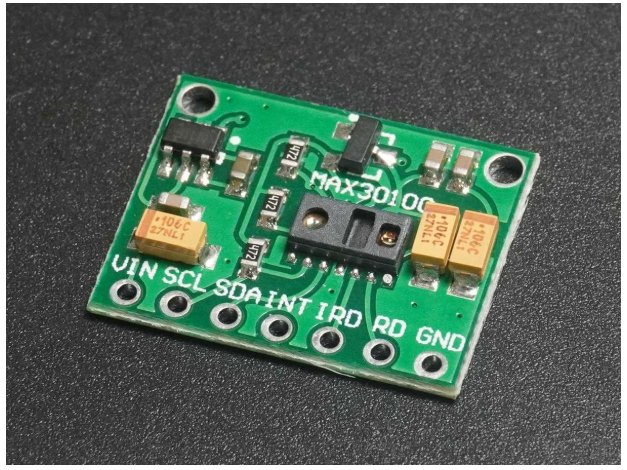
❤️ Heart Rate & SpO₂ Sensor (MAX30100/MAX30102)🔬 Pulse Sensor | SpO₂ Monitor | Wearable Health Tech...