-
 Call Now ! 7905582725
Call Now ! 7905582725 -
 Email Now Help@makerspacekanpur.com
Email Now Help@makerspacekanpur.com
The MPU6050 is a 6-axis motion tracking device made by InvenSense. It combines:
✅ 3-axis accelerometer (measures acceleration)
✅ 3-axis gyroscope (measures rotation)
✅ Communicates via I2C protocol
✅ Built-in Digital Motion Processor (DMP)
| Sensor | Measures | Unit |
|---|---|---|
| Accelerometer | Acceleration on X, Y, Z | m/s² or g |
| Gyroscope | Rotation on X, Y, Z axes | °/sec |
| DMP | Calculates pitch, roll, yaw | Degrees |
| Component | Description |
|---|---|
| ESP32 Board | (Any Devkit) |
| MPU6050 Module | GY-521 or equivalent |
| Jumper Wires | Male-to-female preferred |
| Arduino IDE | With libraries installed |
| MPU6050 Pin | ESP32 Pin | Function |
|---|---|---|
| VCC | 3.3V | Power |
| GND | GND | Ground |
| SDA | GPIO 21 | I2C Data |
| SCL | GPIO 22 | I2C Clock |
MPU6050 works with 3.3V and 5V, but use 3.3V for safety with ESP32.
Open Arduino IDE
Go to Sketch > Include Library > Manage Libraries
Install:
MPU6050 by Electronic Cats or Jeff Rowberg (both work)
Wire (already built-in)
| Application | Usage |
|---|---|
| 🚗 Vehicle tracking | Detect tilts, crashes, movement |
| 🎮 Game controllers | Detect hand motion |
| 🤖 Robotics | Balancing bots, orientation sensing |
| 🚀 Drones | Flight control and stabilization |
| 🧍♂️ Gesture control | Detect specific hand/head movements |
| Issue | Solution |
|---|---|
| All values zero | Check wiring, power, I2C pins |
| MPU not found | Use I2C scanner, change address |
| No output | Confirm Wire.begin(21, 22); is used |
| Values jump too much | Use averaging or DMP |
HOW TO OPERATE


As per official documentation Step by step process for pico program run after power on:Save your pyt...

ESP32 Board are so popular? Mainly because of the following featuresLow-costBluetoothWiFiLow PowerDu...

Node MCU ESP8266 Board are so popular? Mainly because of the following features.Its true Arduino Kil...

🔧 Basic IntroductionL298N is a dual H-Bridge motor driver IC that allows controlling the direction...

🔧 Components Needed:ComponentQuantityESP32 Dev Board1L298N Motor Driver Module1DC Gear Motors (TT o...

The ADXL335 is a small, thin, low-power 3-axis analog accelerometer manufactured by Analog Devices....

🧠 What is an Ultrasonic Sensor?An ultrasonic sensor is a device that uses sound waves to detect how...

📌 What is the DHT11 Sensor?The DHT11 is a basic, low-cost digital temperature and humidity sensor....

🔥 FIRE BOT – Bluetooth Controlled Fire Extinguisher RobotWelcome to the FIRE BOT project! This robo...

BMP180 Sensor: Digital Barometric Pressure SensorThe BMP180 is a digital barometric pressure sensor...
🔧 1. Hardware Overview: 1.8" TFT DisplayMost 1.8" TFT modules are based on the ST7735 driver and co...

The SSD1306 is a popular controller used in OLED (Organic Light Emitting Diode) displays, most commo...

A servo motor is a type of motor designed for precise control of angular position, making it ideal f...
.png)
The Gravity Voice Recognition Module is a user-friendly module developed by DFRobot that allows micr...
.png)
The APDS-9960 is an advanced, compact sensor from Broadcom (formerly Avago Technologies) that offers...

🔍 What is the 28BYJ-48 Stepper Motor?The 28BYJ-48 is a 5V unipolar stepper motor with a built-in re...

How Soil Moisture Sensor Works and Interface it with Esp32 When you hear the term “smart garden,” on...

🔧 What is an Analog Joystick?An analog joystick typically has:2 potentiometers (one for X-axis, one...

📡 What is the NEO-8M GPS Module?The NEO-8M is a high-precision GNSS GPS receiver by u-blox, capable...
🔧 What is a NeoPixel?NeoPixel is Adafruit’s name for individually addressable RGB LEDs using the WS...

🧠 What is a PIR Sensor?PIR = Passive Infrared SensorA PIR sensor detects motion by measuring change...

✅ What is AI Thinker GP-02?The AI Thinker GP-02 is a GNSS (GPS) module, designed to work with satel...

📡 What is SIM900?The SIM900 is a GSM/GPRS module from SIMCom. It allows microcontrollers like ESP32...

🧠 What is a Push Button?A push button is a simple mechanical switch that connects two points in a c...

🤔 What is a Tilt Sensor?A tilt sensor (also called a ball switch or mercury switch) is a digital sw...

🎨 What is the TCS34725?The TCS34725 is a color sensor made by AMS (now part of Renesas).It detects...

📘 What is an I2C LCD?An I2C LCD is a Liquid Crystal Display that uses the I2C communication protoco...

🌡️ What is DS18B20?The DS18B20 is a digital temperature sensor from Maxim Integrated (now Analog Dev...

⏰ What is DS1307 RTC?The DS1307 is a real-time clock IC by Maxim Integrated that keeps track of:Sec...

🎵 What is DFPlayer Mini?The DFPlayer Mini is a tiny, standalone MP3 audio player module. It can pla...

📡 What is an IR Receiver?An IR (Infrared) Receiver module receives signals from an IR remote contro...

📌 What is a Rotary Encoder?A rotary encoder is an electro-mechanical sensor that converts the angul...

📌 What is the Dot Matrix Display with MAX7219?A Dot Matrix Display is an arrangement of LEDs in a g...
.png)
📌 What is ESP-NOW?ESP-NOW is a wireless communication protocol developed by Espressif, allowing ESP...
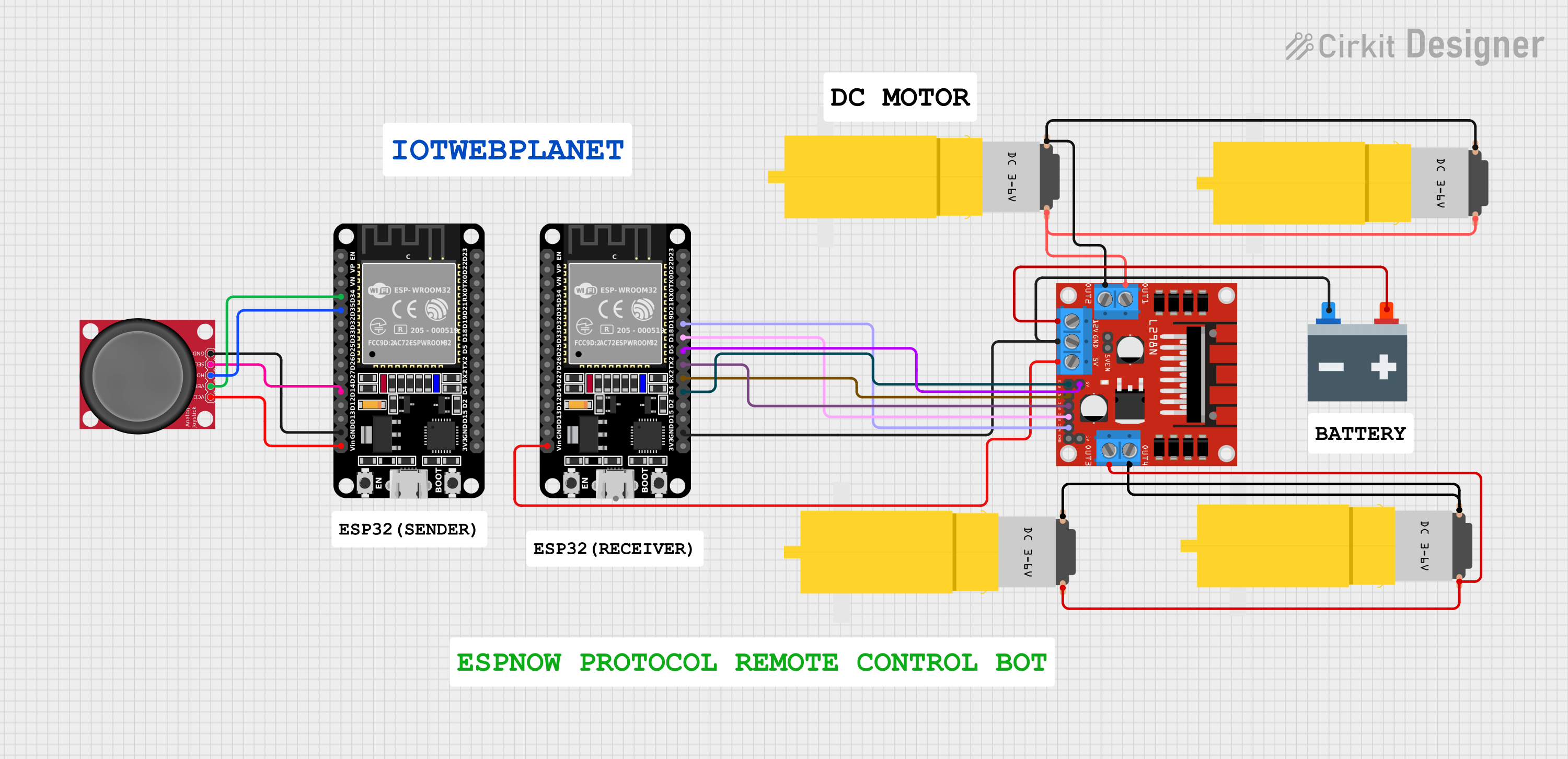
🤖 ESP32 Joystick Controlled Robot Using ESP-NOW Protocol & L298N Motor DriverWireless bot control w...
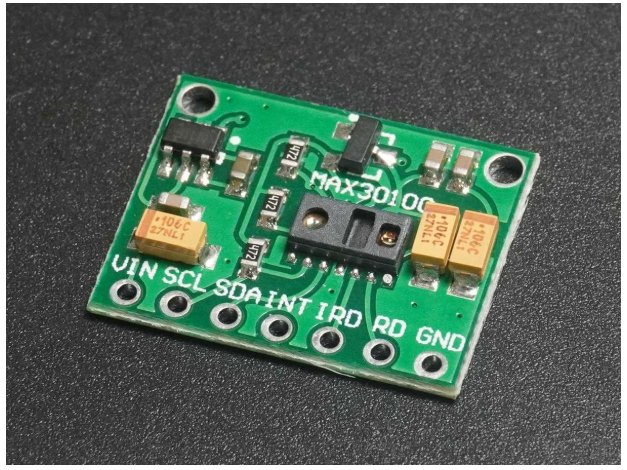
❤️ Heart Rate & SpO₂ Sensor (MAX30100/MAX30102)🔬 Pulse Sensor | SpO₂ Monitor | Wearable Health Tech...